

Raspberry Pi Roboter – Big Rob Motortreiber BTS7960B und Software
Zuerst hatte ich eine kleine H-Brücke mit 2,5 A verbaut um die DC Motoren mit Strom zu versorgen....
Weiterlesen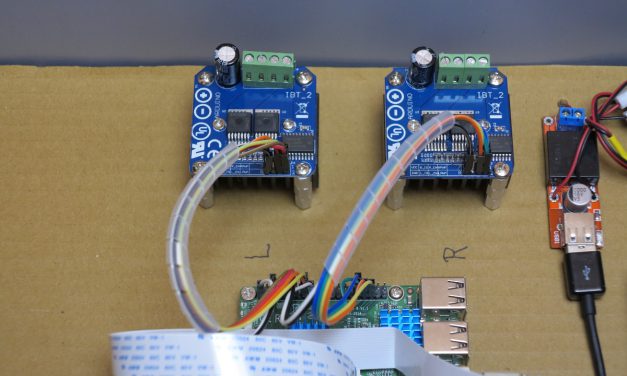
Zuerst hatte ich eine kleine H-Brücke mit 2,5 A verbaut um die DC Motoren mit Strom zu versorgen....
Weiterlesen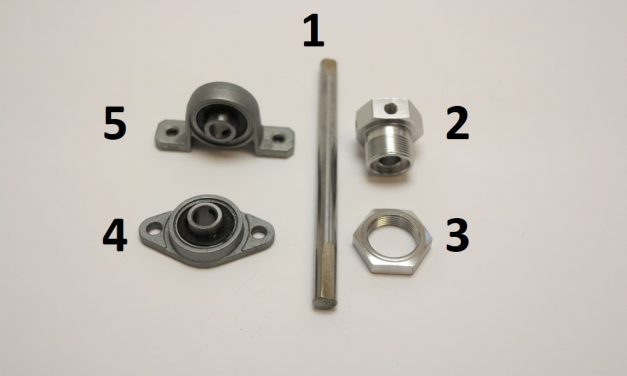
Dieser Artikel beschreibt die Komponenten für den Antrieb des Big Rob die ich selber gebaut oder...
Weiterlesen
Der Big Rob ist der neueste Roboter den ich entworfen habe für Off-Road Aktivitäten. Der Roboter...
WeiterlesenRoboter-Autos mit dem Raspberry Pi

Recent Comments