

Raspberry Pi Servo Motor mit Python ansteuern und programmieren
Warum ich einen Servo Motor mit dem Raspberry Pi ansteuern möchte erkläre ich nachfolgend. Ich...
Weiterlesen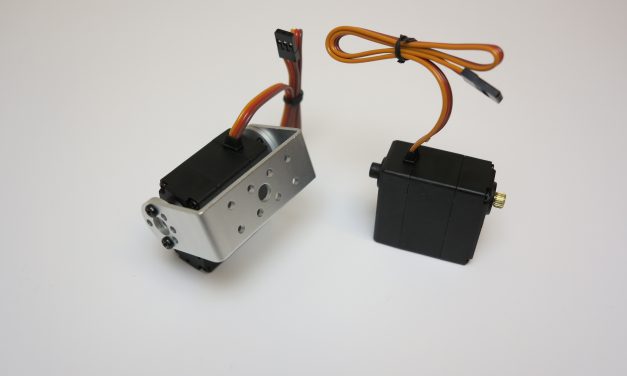
Warum ich einen Servo Motor mit dem Raspberry Pi ansteuern möchte erkläre ich nachfolgend. Ich...
Weiterlesen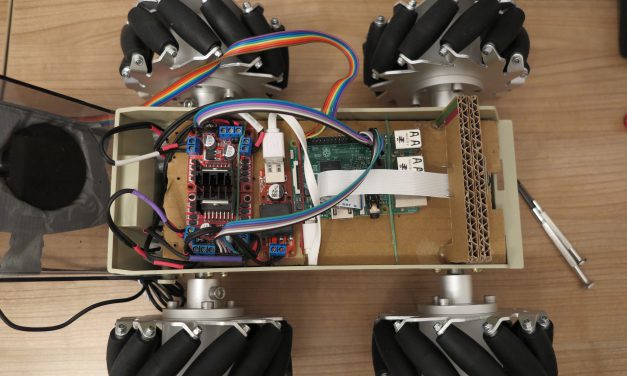
Roboter Fahrzeuge kennen grundsätzliche unterschiedliche Antriebe für die Fortbewegung. Ich habe...
Weiterlesen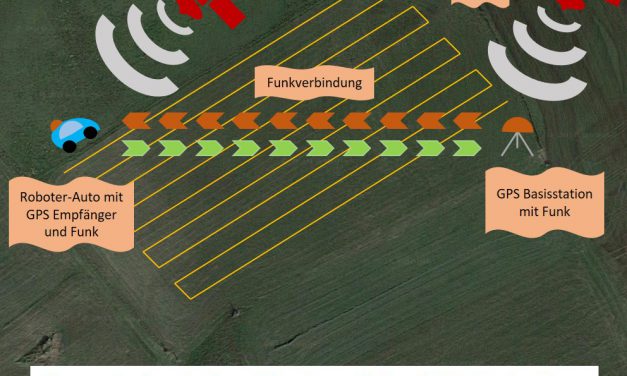
In diesem Beitrag stelle ich die Theorie vor wie der Aufbau für eine präzise GNSS Positionierung...
Weiterlesen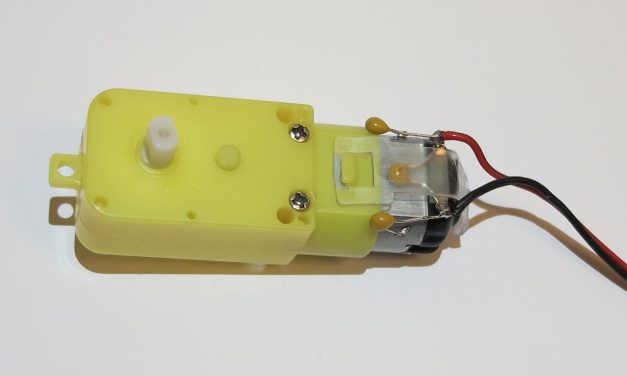
Mit dieser Anleitung beschreibe ich wie kleine 3 V bis 6 V DC Elektromotoren entstört werden...
Weiterlesen
Ich baue seit ein paar Jahren Roboter-Autos die in der Wohnung und auch im Freien fahren können....
WeiterlesenRoboter-Autos mit dem Raspberry Pi

Recent Comments