

Updates zum Buch – Roboter-Autos mit dem Raspberry Pi
Das Buch Roboter-Autos mit dem Raspberry Pi in der Auflage von 2016 und 2019 das ich geschrieben...
Weiterlesen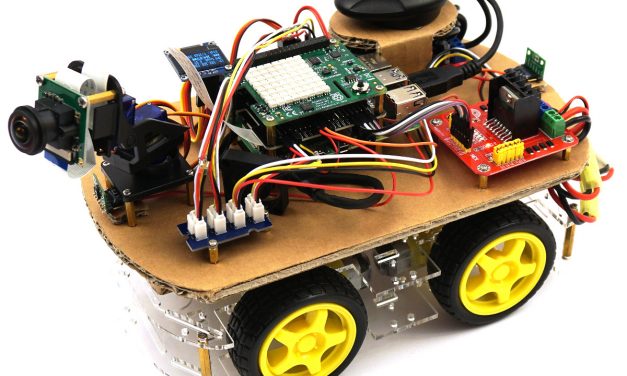
Das Buch Roboter-Autos mit dem Raspberry Pi in der Auflage von 2016 und 2019 das ich geschrieben...
Weiterlesen
Im November 2016 haben Adam Conway und Will Roscoe das Donkey Car Projekt ins Leben gerufen. Die...
Weiterlesen
Jetzt geht es darum die OpenBot App für Dein Android Smartphone selber kompilieren zu können. Wenn...
Weiterlesen
Jetzt geht es darum das Android Studio zu installieren um selber die Android App des OpenBot...
Weiterlesen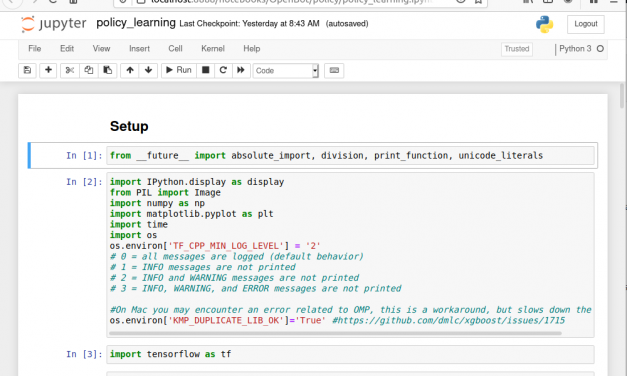
Im vorherigen Artikel ging es darum die Trainingsdaten also die Bilder und Sensordaten soweit...
Weiterlesen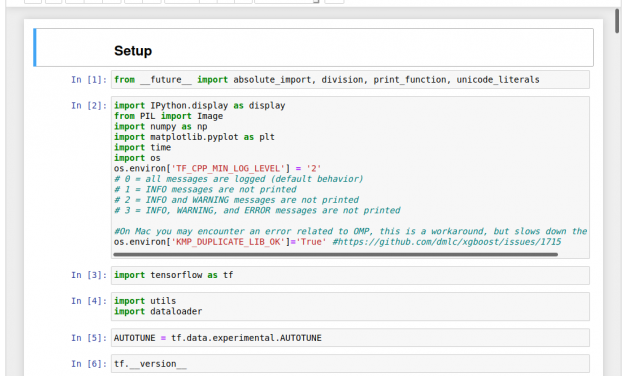
Jetzt gehe ich einmal davon aus, dass ausreichend viele Trainingsdaten aufgezeichnet wurden und...
Weiterlesen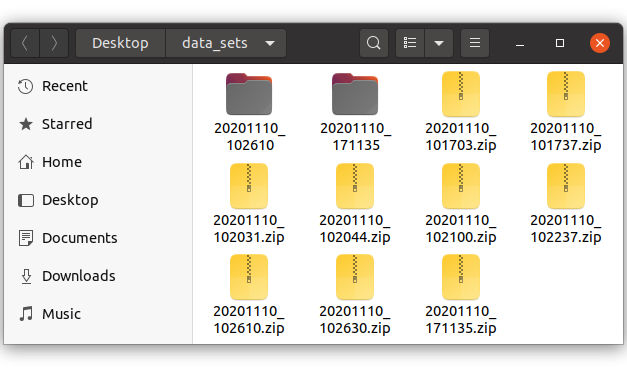
In diesem Beitrag geht es darum Trainingsdaten aufzuzeichnen um ein eigenes neuronales Netz...
Weiterlesen
Ich gehe jetzt davon aus, dass das Roboter Auto schon im NoPhone Modus fährt und alles soweit...
Weiterlesen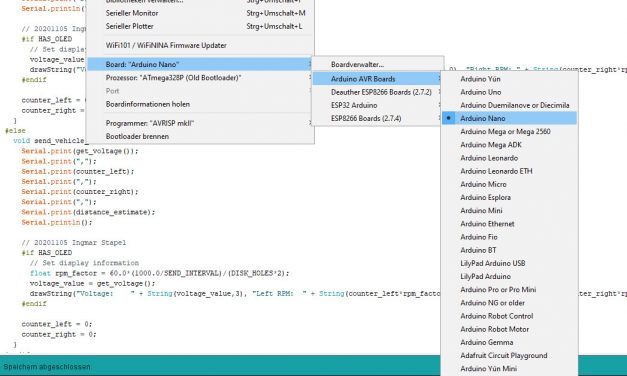
Jetztmuss die Arduino Entwicklungsumgebung eingerichtet werden muss damit Du die Software auf den...
Weiterlesen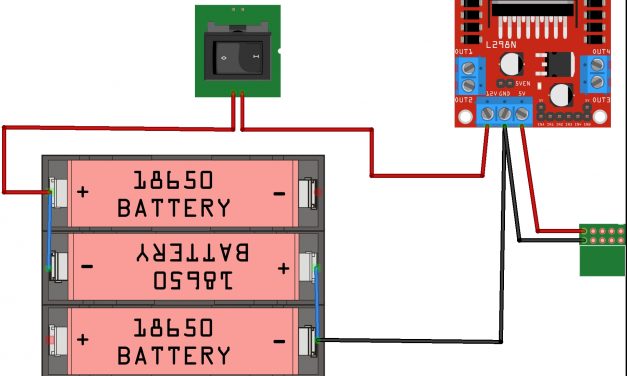
Nach dem jetzt alle elektronischen Komponenten im frisch aufgebauten Chassis unterbracht sind geht...
Weiterlesen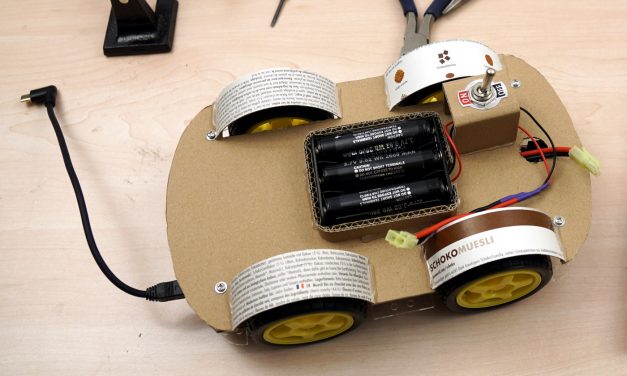
Für den Bau des Chassis des OpenBot Roboter Autos setze ich auf das 4WD Smart Car Chassis statt...
Weiterlesen
Es gab in den letzten Jahren immer wieder Projekte die ein Smartphone für die Steuerung eines...
Weiterlesen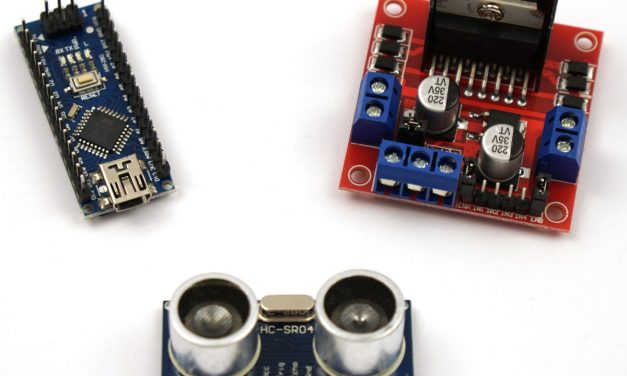
In diesem Beitrag geht es jetzt zunächst einmal um die Stromversorgung des OpenBot und um die...
Weiterlesen
Für den Bau des Roboter Autos bzw. des OpenBot werden verschiedene Komponenten wie ein Chassis und...
Weiterlesen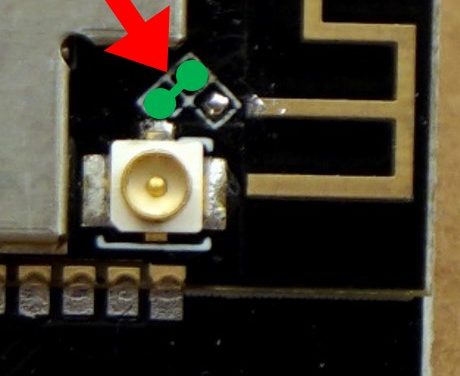
Die kleine Anleitung soll mit vielen Bildern und Tipps dabei helfen wie z. B. bei einem ESP32-CAM...
Weiterlesen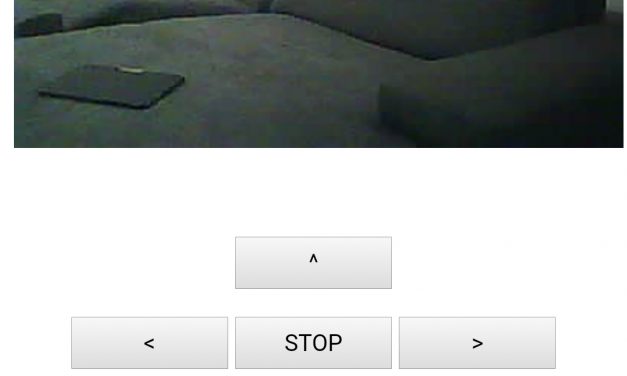
Mit dem vorherigen Beitrag und der ersten kleinen Ansteuerung der Motoren ist das Roboter Auto...
Weiterlesen
In den Vorherigen Berichten wurde auf den ESP32-CAM im Detail eingegangen. Du hast erfahren wie...
Weiterlesen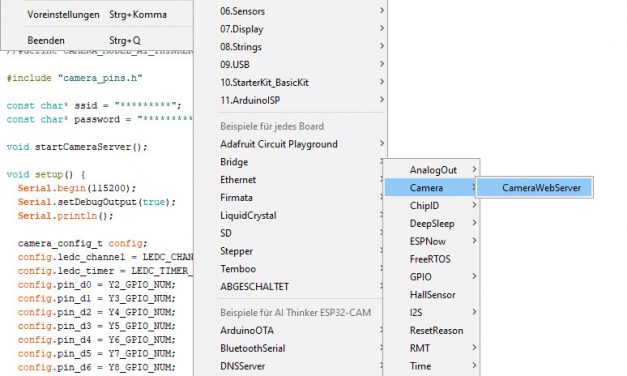
In diesem Artikel beschreibe ich wie die Arduino Entwicklungsumgebung eingerichtet werden muss...
Weiterlesen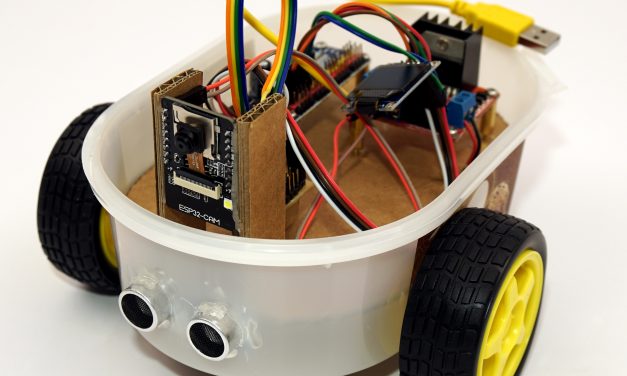
Mit diesem Beitrag beginnt eine Artikelserie die den Bau eines kleinen Roboter Autos mit live...
Weiterlesen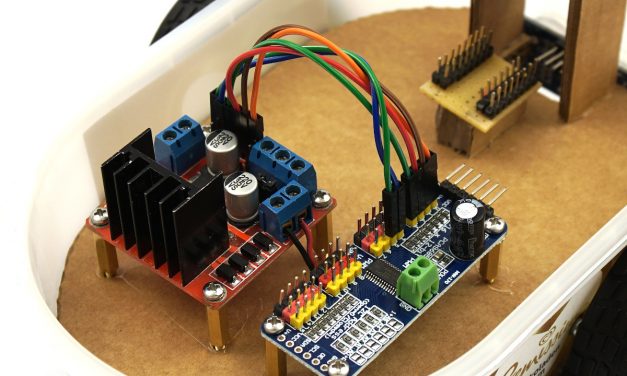
Im ESP32-CAM Roboter Auto werden zwei kleine 6V Getriebemotoren verbaut. Diese gelben Motoren sind...
Weiterlesen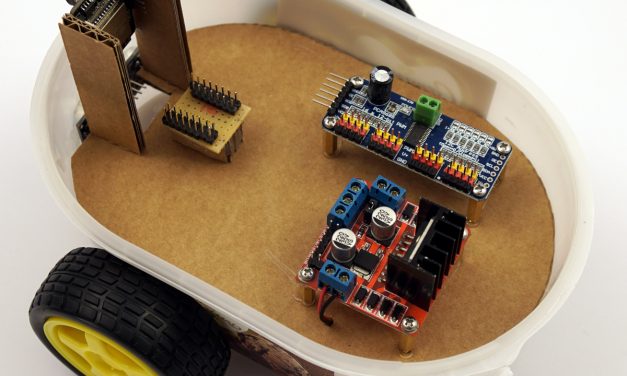
Das Chassis kann aus vielen Materialien oder Verpackungen die sonst im Abfall landen aufgebaut...
Weiterlesen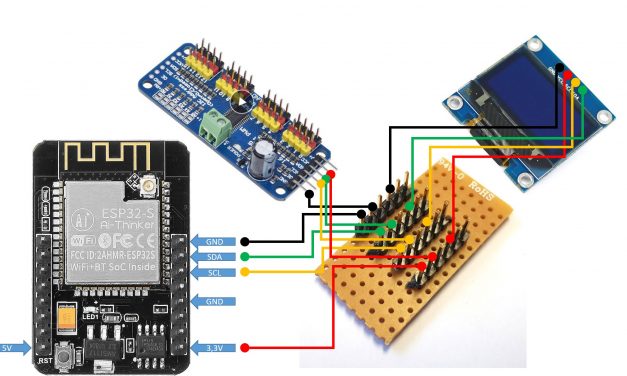
Damit wir den L298N Motortreiber mit dem ESP32-CAM Modul ansteuern können benötigen wir den...
Weiterlesen
Nach dem jetzt das live Video Bild der Kamera über das Netzwerk übertragen wird geht es in diesem...
Weiterlesen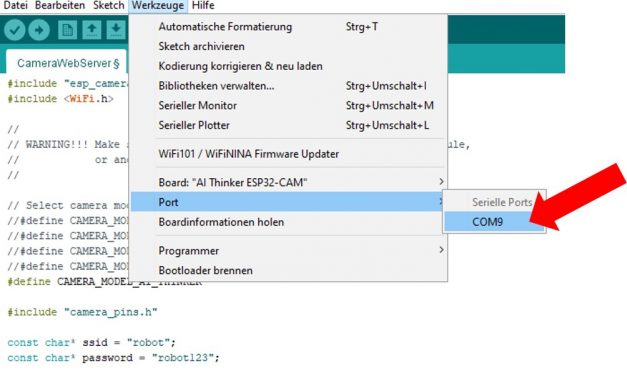
Damit das ESP32-CAM Modul programmiert werden kann muss dieses zunächst einmal mit dem PC...
Weiterlesen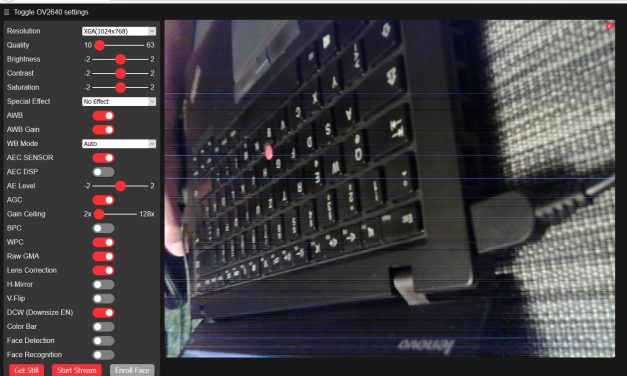
Im vorherigen Artikel hast Du das ESP32-CAM Modul mit dem USB-Serial Adapter verbunden und den...
Weiterlesen
Seit einigen Jahren habe ich immer wieder darüber nachgedacht einen kleinen Roboter zu bauen der...
Weiterlesen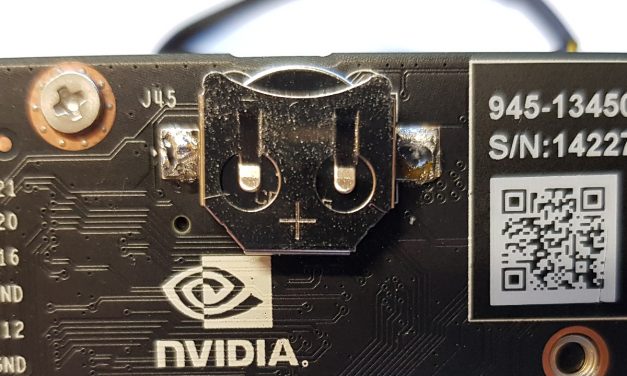
Batteriehalter für Real Time Clock auflöten Der Batteriehalter geht recht einfach fest zu löten....
Weiterlesen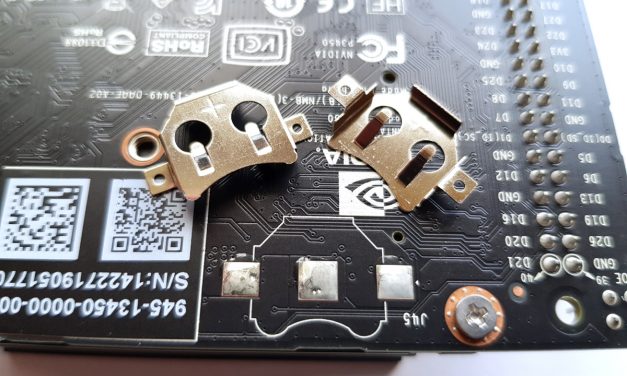
Ich habe schon einige Jetson Nano SBCs verbaut und habe den kleinen Computer für das Training von...
Weiterlesen
Toll wäre es ja noch wenn wir das Roboter Auto mit dem Smartphone fernsteuern könnten. Genau das...
Weiterlesen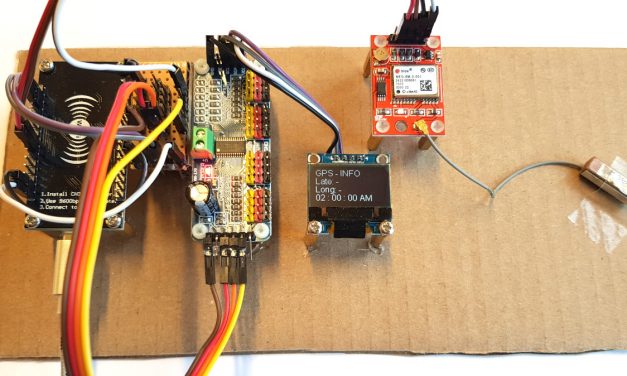
Ich habe bei meinen Raspberry Pi Robotern immer USB GPS Empfänger verwendet. Hier bei diesem...
Weiterlesen
Ich hatte mir alle Bauteile in Ruhe angeschaut und auf meinem großen Schreibtisch ausgebreitet. Da...
Weiterlesen
Die Duckietown-Plattform besteht einmal aus den Duckiebots und aus der Duckietown. Die Duckiebots...
Weiterlesen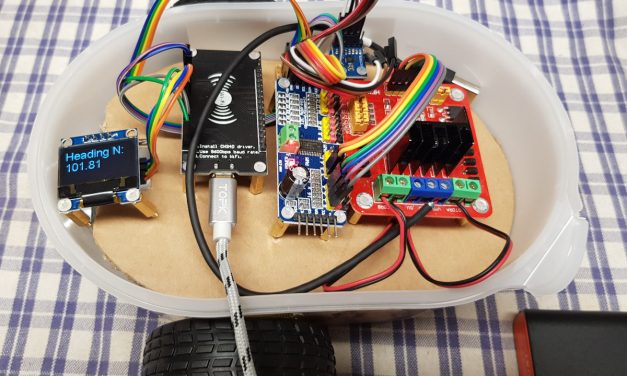
Mein Ziel ist es ja den kleine Roboter mit einem GPS Empfänger auszustatten damit er GPS-Wegpunkte...
Weiterlesen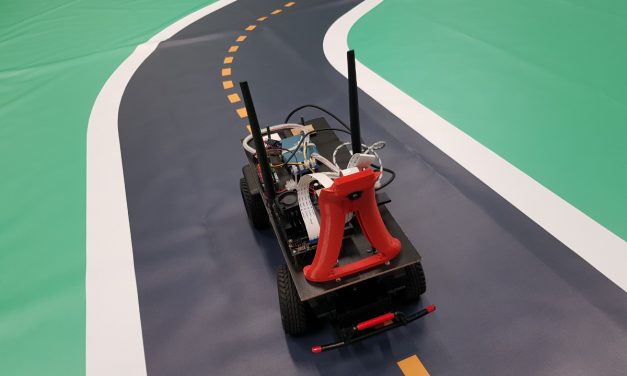
In diesem Beitrag beschreibe ich wie ein Donkey Car mit der aktuellen 3.1.1 Version des...
Weiterlesen
Für meine Donkey Cars mit dem Jetson Nano aber auch für andere Projekte verwende ich immer sehr...
Weiterlesen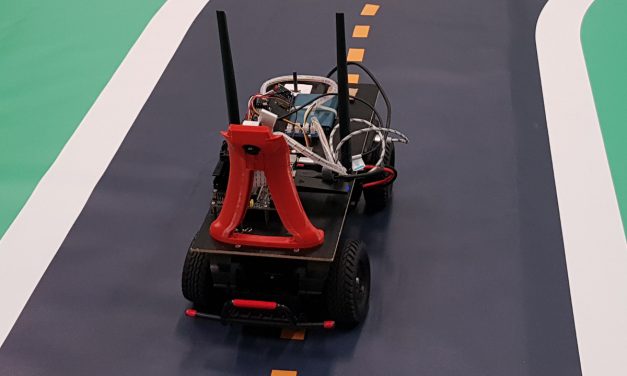
Nach dem jetzt alle Bibliotheken und Frameworks soweit auf dem Jetson Nano installiert sind geht...
Weiterlesen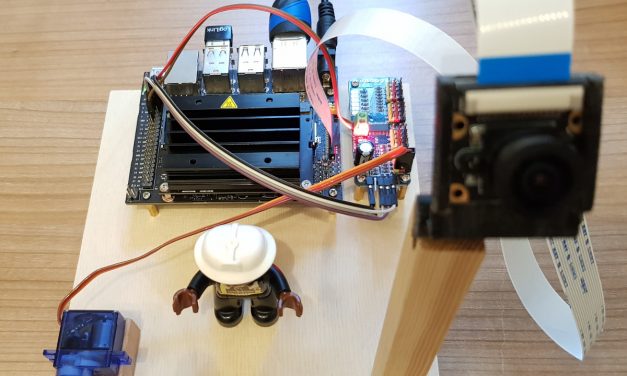
Der Jetson Nano ist ideal für kleine Projekte am Wochenende. Eine Vielzahl an Projekten sind in...
Weiterlesen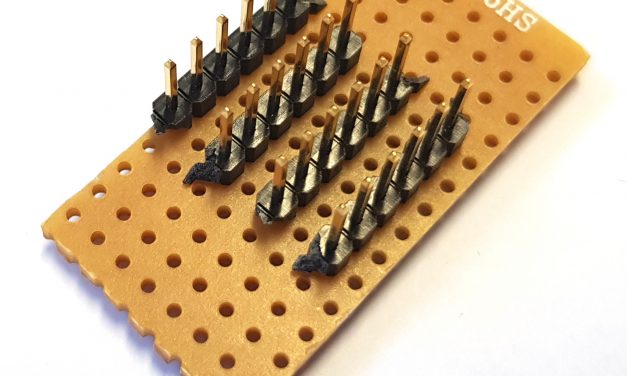
Der Raspberry Pi verfügt über den I²C Bus an dem verschiedene Sensoren, OLED Displays und z. B....
Weiterlesen
Ich wollte mit meinem Jetson Nano nicht nur ein Donkey Car steuern sondern ebenfalls auch das ein...
Weiterlesen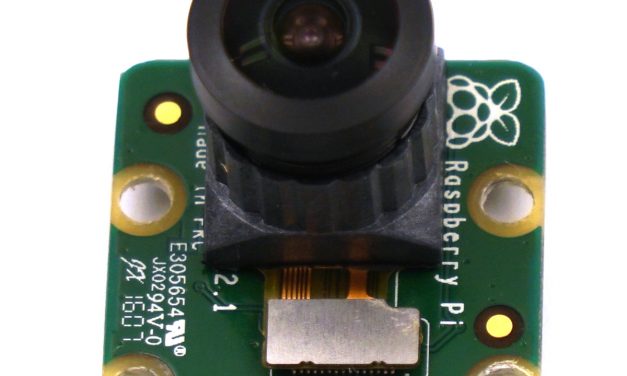
Noch ist beim Jetson Nano die Auswahl an Kameramodellen die am CSI Anschluss des Nano...
Weiterlesen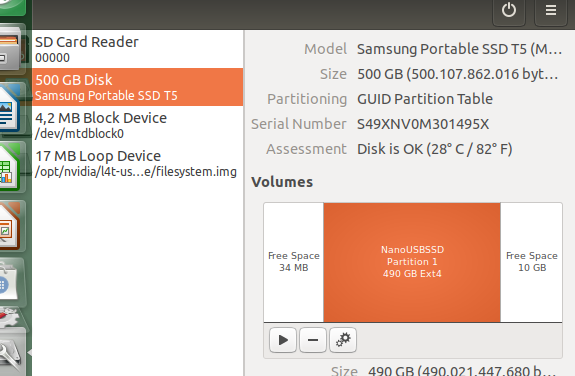
Ich werde die komplette Installation meines Jetson Nano von der micro SD-Karte auf eine SSD...
Weiterlesen
Die immer schneller fortschreitende Digitale Transformation, stellt deutsche Unternehmen vor...
Weiterlesen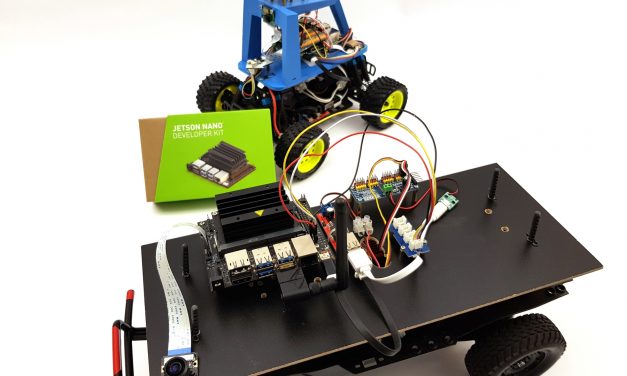
Dieser Beitrag wurden durch folgenden Beitrag ersetzt: Autonom fahrendes Nvidia Jetson Nano AI...
Weiterlesen
Ich habe auf meinem Donkey Car einen IMU Sensor 9 DOF absolute Orientation verbaut. Die Idee die...
Weiterlesen
Das Neuronale Netz kann nicht auf dem Raspberry Pi trainiert werden. Der Raspberry Pi ist von...
Weiterlesen
Wir kennen es alle auf Meetups oder Produktpräsentationen steht nicht immer ein W-LAN zur...
Weiterlesen
Bei einen meiner Roboter genauer gesagt bei dem GoPiGo Modell von Exter Industries hatte ich mir...
Weiterlesen
Ich hatte schon 2017 das erste mal mit Jupyter-Notebooks gearbeitet und fand die Möglichkeiten...
Weiterlesen
Bei meiner Suche nach einer Alternative zu den klassischen Ultraschall Sensoren bin ich auf die...
Weiterlesen
Nach dem ich jetzt mehrere Donkey Cars aufgebaut habe und mit diesen Modellautos Trainingsdaten...
Weiterlesen
Ich habe mir ein neues Donkey Car auf Basis des Tamiya CC-01 Fahrwerkes aufgebaut. Die Idee war...
Weiterlesen
Da ich gerne das Training auf einem professionellen Rechner für Maschinenlernen mit mehreren...
Weiterlesen
Ich war für meine Outdoor Roboter Projekte auf der Suche nach einem Funkgateway der viele Meter...
Weiterlesen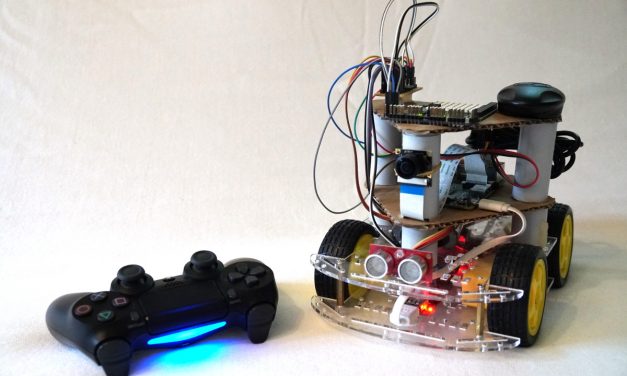
Ich wollte schon immer meine Roboter Autos mit einem Spiele Controller wie einem Playstation 4...
Weiterlesen
Bei der Umsetzung des modularen Aufbaus des Big Rob Roboters behalte ich die vorhandene Elektronik...
Weiterlesen
Ich habe meinen GoPiGo Roboter mit zusätzlicher Hardware ausgestattet. Die Idee ist zu sehen wie...
Weiterlesen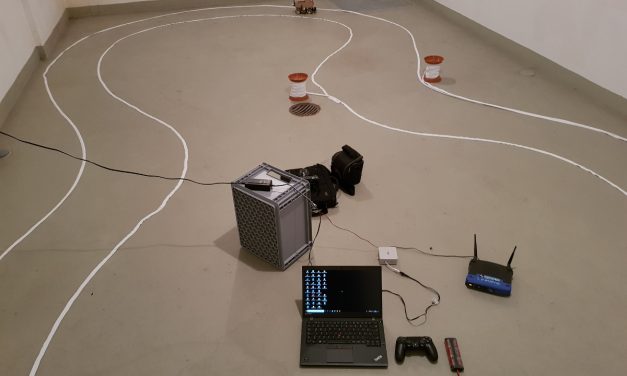
Nach dem ich alles soweit vorbereitet hatte, dass Nahtband mit dem Bleiband vernäht war habe ich...
Weiterlesen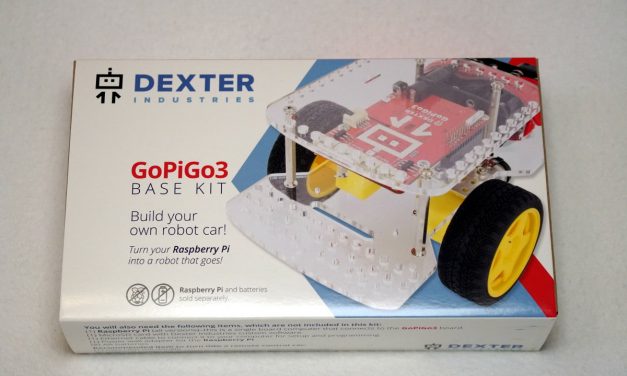
Der GoPiGo Roboter als Starter Kit von Dexter Industries enthält alles was man braucht um einen...
Weiterlesen
Nach dem das Donkeycar soweit aufgebaut ist und die Lenkung für die linke und rechte Kurvenfahrt...
Weiterlesen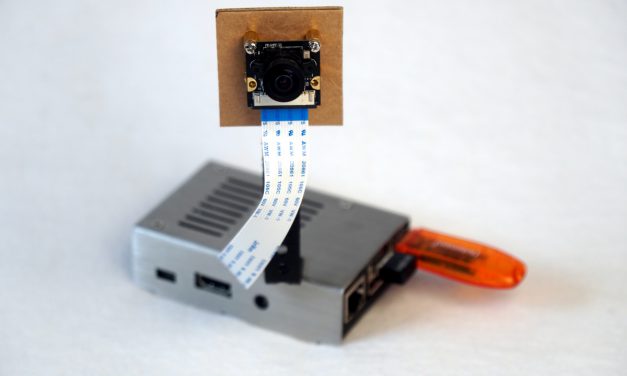
Nach meinem ersten Artikel über das Zeitraffer Video Projekt auf einem Raspberry Pi Computer habe...
Weiterlesen
Für die Steuerung meiner Roboter habe ich mir einen Playstation 4 (PS4) Controller zugelegt. Die...
Weiterlesen
Mein großer BigRob Roboter ist so gebaut, dass dieser viele Stunden im Freien operieren kann....
Weiterlesen
Ich habe lange im Netz nach einer Anleitung gesucht die beschreibt wie ich einen Playstation 3...
Weiterlesen
Ich habe immer wieder nach Verlängerungen für das klassische CSI Kabel gesucht mit dem die...
Weiterlesen
Der aktuelle Stand sollte sein, dass das Chassis des Donkey Cars aufgebaut ist, die Elektronik...
Weiterlesen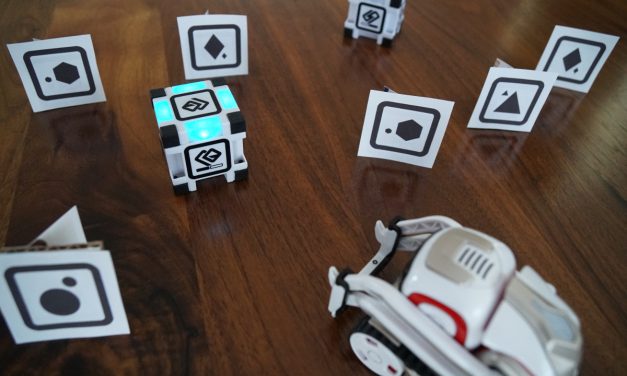
Der COZMO Roboter kann mit seiner Kamera Marken, also kleine schwarz eingerahmte Symbole mit...
Weiterlesen
Der klassische Modellbau Fahrtenregler findet sich in RC Autos, Booten und Flugmodellen. Ich hatte...
Weiterlesen
Hinweis: Bitte folge dieser Anleitung für die Software Installation eines Donkey Cars. Autonom...
Weiterlesen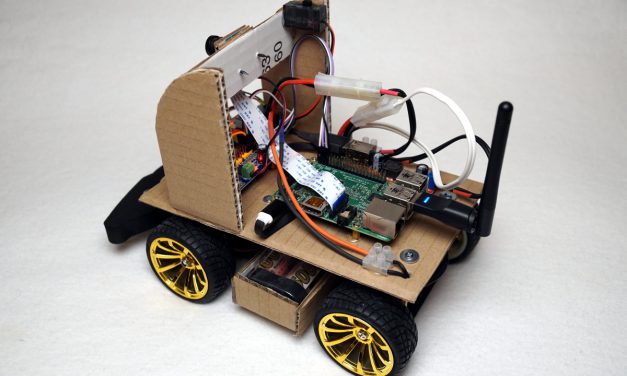
Alle nachfolgend aufgeführten Komponenten von Raspberry Pi, Kamera bis zum Servo Kontroller werden...
Weiterlesen
In diesem Beitrag gehe ich auf die drei RC Auto Modelle ein die ich bisher zu Donkey Cars umgebaut...
Weiterlesen
Ich wollte schon immer mal eines meiner Roboter Auto Modelle von einer künstlichen Intelligenz...
Weiterlesen
Ich dachte mir ja erst solch einen Transportkoffer brauche ich nicht für den COZMO Roboter als...
Weiterlesen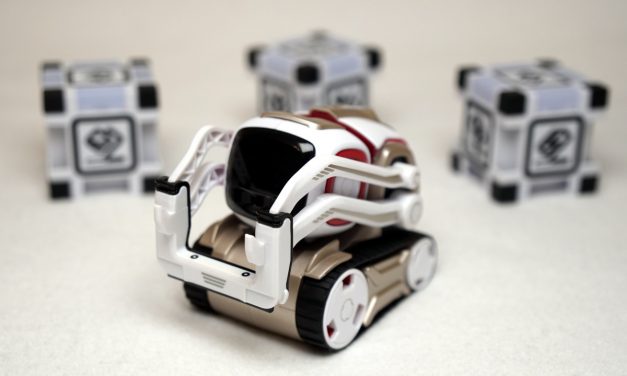
Ich habe mir die Frage gestellt ob es möglich ist die ANKI COZMO Entwicklungsumgebung auch auf...
Weiterlesen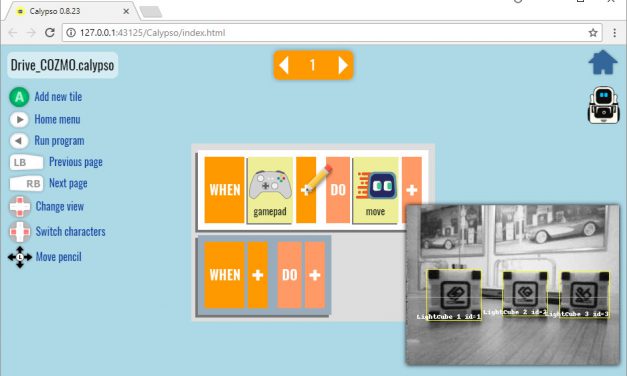
Für die Programmierung des COZMO Roboters gibt es neben der ANKI Software auch weitere Lösungen....
Weiterlesen
Ich bin schon sehr auf das ANKI SDK gespannt mit dem es möglich ist selber den COZMO Roboter zu...
Weiterlesen
Der COZMO verspricht die Attraktion für Kinder ab einem Alter von 8 Jahren zu sein. Er bietet...
Weiterlesen
Von Anfang an hatte ich mit dem Entwurf des Big Rob Raspberry Pi Roboter die Idee verfolgt diesen...
Weiterlesen
Für einen Roboter Auto Wettbewerbe, den ich organisiert habe, hatte ich den Bedarf die...
Weiterlesen
Nach dem Zusammenbau folgt die Installation der Software. Die Installation und Konfiguration...
Weiterlesen
Ich hatte mir das AIY Voice Kit für den Raspberry Pi vor ein paar Monaten vorbestellt da ich es...
Weiterlesen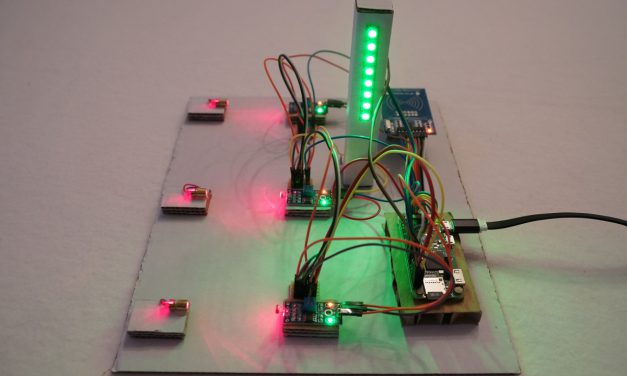
Für die Lichtschranke mit Start-Ampel habe ich einen Raspberry Pi ZERO W als zentrale...
Weiterlesen
Für einen Workshop mit 25 Teams benötige ich eine technische Lösung um automatisch die Rundenzeit...
Weiterlesen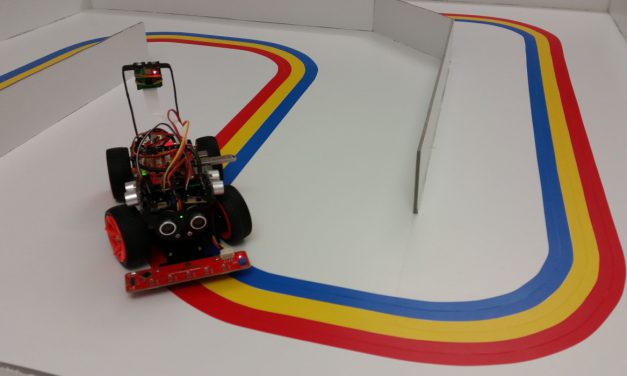
Der Roboter Bausatz PiCar-S ist ideal für die ein oder andere komplexe Programmieraufgabe. Dank...
Weiterlesen
Ich hatte mich dazu entschieden den SainSmart Desktop Roboter Arm mit einem Raspberry Pi Computer...
Weiterlesen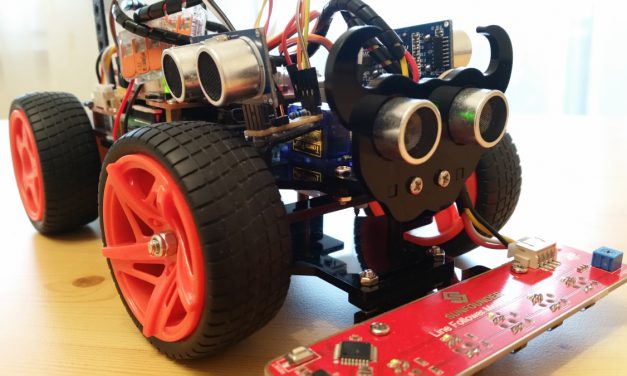
Ich wollte schon immer mal mehrere HC-SR04 Ultraschall Sensoren an einem Roboter Auto verbauen. In...
Weiterlesen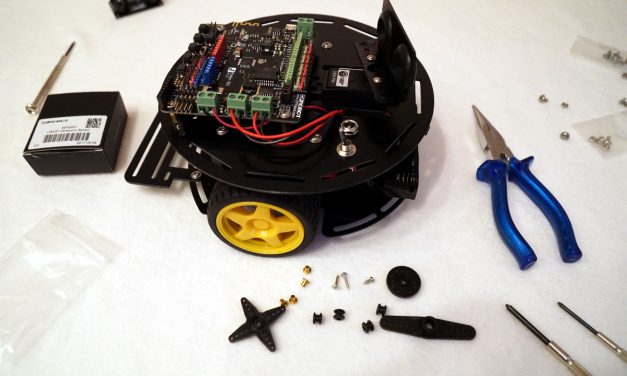
Ich habe die DFRobot mobile Platform zusammen gebaut und möchte mit ein paar Bildern und meinen...
Weiterlesen
Der Roboter Arm verfügt über sechs Servo Motoren die einzeln engesteuert werden können. Bei meinen...
Weiterlesen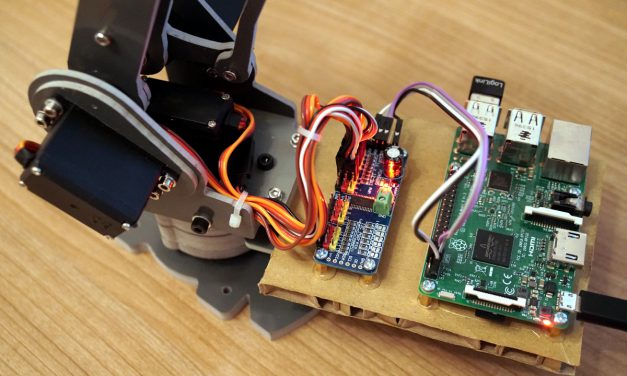
Der SainSmart Roboter Arm ist eigentlich für einen Arduino gedacht bzw. für diesen sind die...
Weiterlesen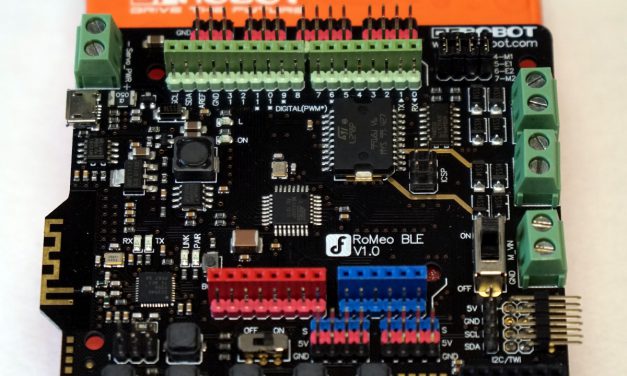
Ich hatte bis jetzt immer Roboter Autos zusammen mit einem Raspberry Pi Computer gebaut. Aber...
Weiterlesen
Der bei dem Roboter Auto Bausatz mitgelieferte Ultraschall Sensor von SunFounder funktioniert vom...
Weiterlesen
Endlich ist es soweit und ich habe meinen 6 -Achsen Roboter Arm erhalten. Dieses Modell von...
Weiterlesen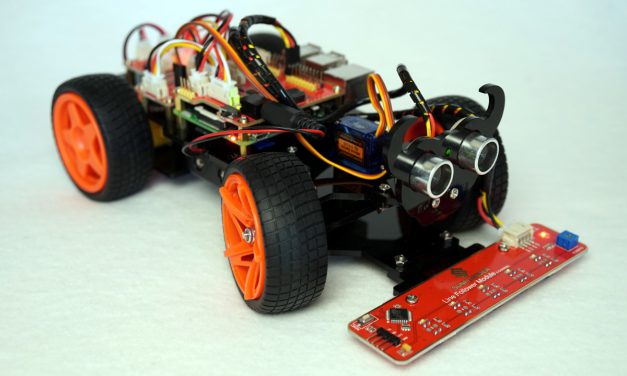
Ich habe mit dem Kauf meines zweiten Roboter Autos von SunFounder wieder die richtige Wahl...
Weiterlesen
Ich habe immer wieder nach einer einfachen Möglichkeit gesucht einen HC-SR04 Ultraschall Sensor an...
Weiterlesen
Der Roboter Auto Bausatz Picar-S von SunFounder ist der zweite Bausatz den ich mir von SunFounder...
Weiterlesen
Ich habe den Kinder Roboter aus Pappe gebaut die ich z. B. von Umverpackungen von Möbeln die wir...
Weiterlesen
Der Raspberry Pi Computer benötigt eine 5V Stromquelle. Diese muss auch in den Roboter Autos die...
Weiterlesen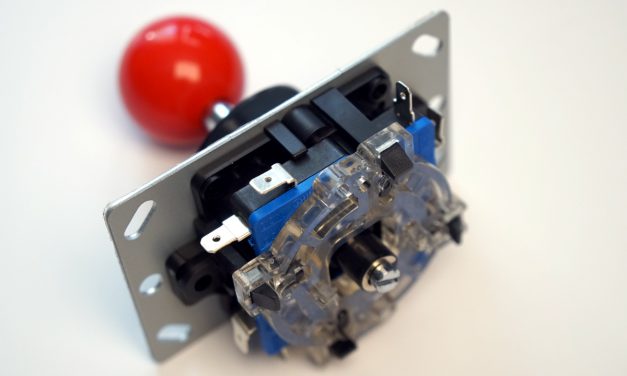
In diesem Beitrag zeige ich wie ein Arcade Joystick an den Raspberry Pi im Kinderroboter eingebaut...
Weiterlesen
Bei der Elektronik die ich in den Devastator Roboter Bausatz eingebaut habe, habe ich auf bewährte...
Weiterlesen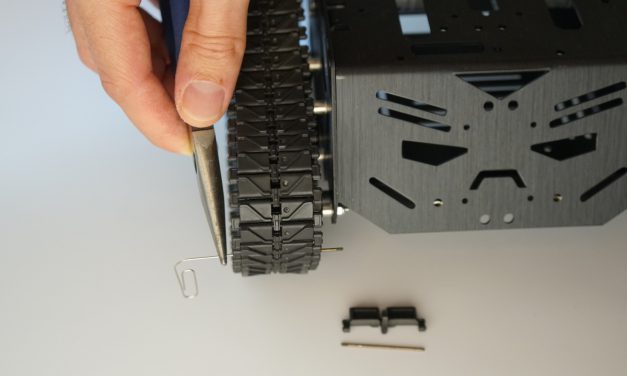
Nach dem ich den Roboter Bausatz von DFRobot fertig aufgebaut hatte beschäftigte ich mich damit...
Weiterlesen
Alle Bauteile des Devastator Bausatzes sind alle in beschrifteten kleinen Tüten verpackt. Auch...
Weiterlesen
Ich habe mir die Devastator Tank mobile Roboterplattform von DFRobot bestellt. Es ist ein...
Weiterlesen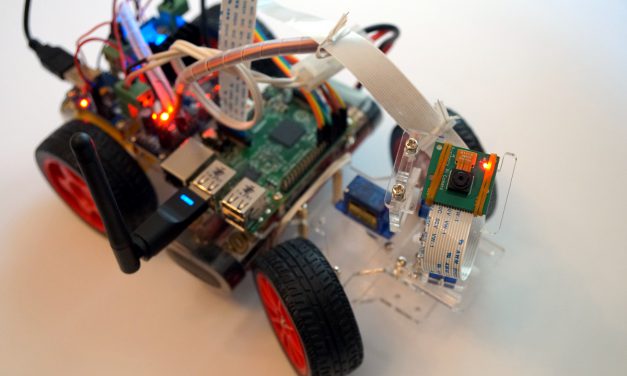
Mich hatte es interessiert wie schwierig es ist die USB Kamera aus dem SunFounder Roboterbausatz...
Weiterlesen
Das original SunFounder Programm für die Steuerung des Roboter Autos ist von seiner Architektur...
Weiterlesen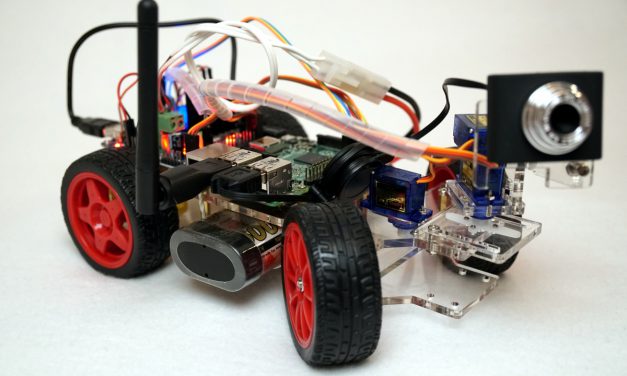
Die Installation der notwendigen Software auf dem Raspberry Pi hat dank der Anleitung im Bausatz...
Weiterlesen
Ich habe die Verkabelung des Roboter Autos anhand der beiliegenden Anleitung aus dem Kit von...
Weiterlesen
Ich habe bei dem Zusammenbau des Roboter Autos mit der deutschen Bauanleitung losgelegt. Diese...
Weiterlesen
Ich wurde in der Vergangenheit immer wieder von Lesern meines Buches sowie von Lehrern...
Weiterlesen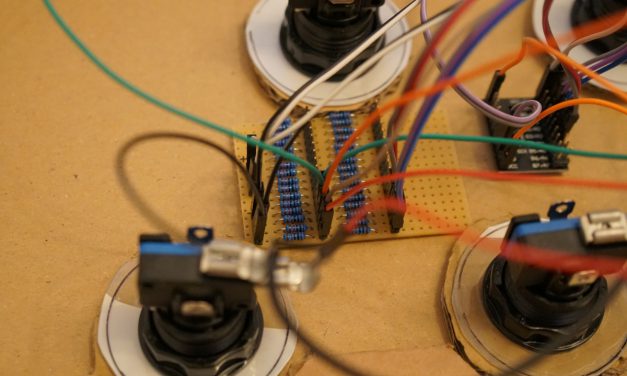
In diesem Beitrag geht es um die Verkabelung der fünf Arcade-Knöpfe die ich am Spielzeug Roboter...
Weiterlesen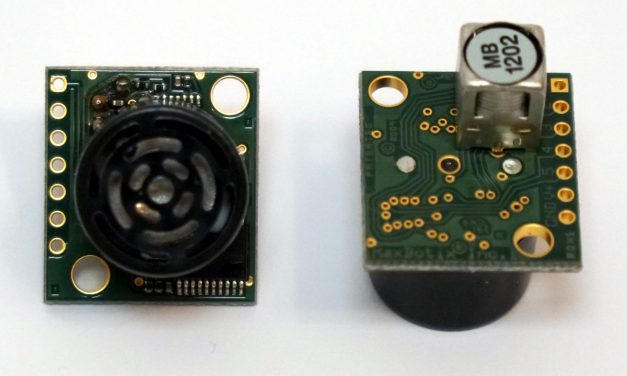
Ich habe zwei MaxBotix I2CXL MaxSonar EZ Ultraschall Sensoren für meinen Roboter gekauft. Ich habe...
Weiterlesen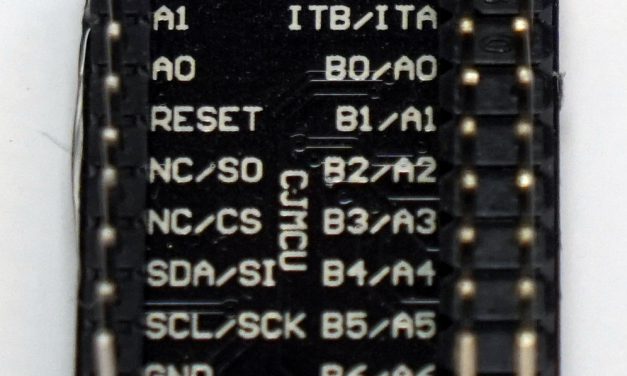
Der I2C Bus ist sehr gut geeignet verschiedene Sensoren oder Boards wie einen Servo Kontroller am...
Weiterlesen
Der Kinder Roboter braucht für die Bedienung große Kinder gerechte Arcade Knöpfe und idealerweise...
Weiterlesen
Lautsprecher und Mikrophon am Raspberry Pi Der Sound am Raspberry Pi ist immer noch ein eigenes...
Weiterlesen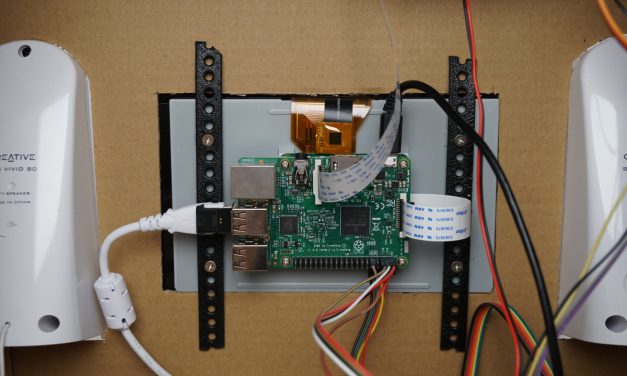
Ich habe mir Gedanken darüber gemacht welche Funktionen alle in den Roboter eingebaut werden...
Weiterlesen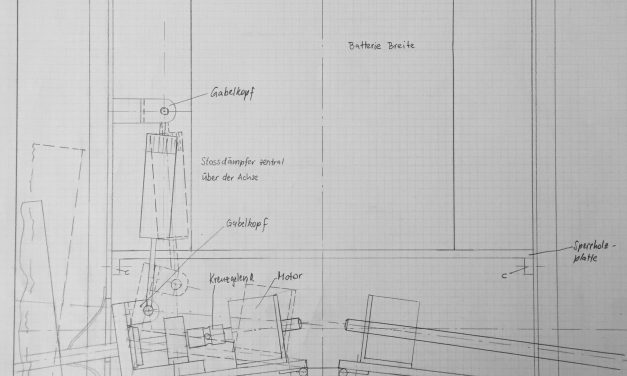
Für den Big Rob Roboter hat ein begeisterter Maker aus der Schweiz seine Idee eines verbesserten...
Weiterlesen
Für den Kinder-Roboter habe ich noch weitere Robotererweiterungen vorgesehen die den Roboter noch...
Weiterlesen
In den Kopf meines Roboter habe ich eine Raspberry Pi Kamera, einen Ultraschall Sensor sowie zwei...
Weiterlesen
Es ist wichtig für die Erscheinung des Roboter, dass der Kopf gut aussieht und auch gut...
Weiterlesen
Der Körper des Kinder Roboter ist aktuell aus Pappe gebaut. Natürlich wäre ein Körper aufgebaut...
Weiterlesen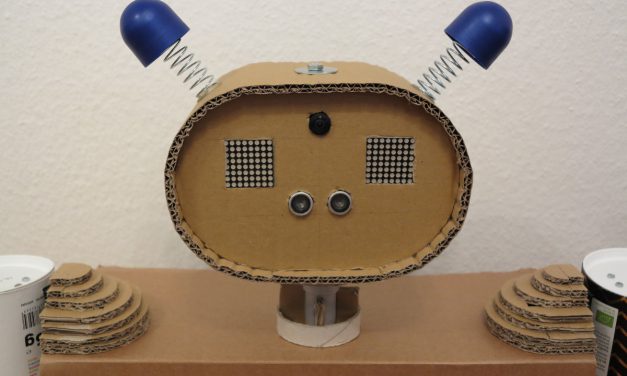
Natürlich braucht ein Kinder-Roboter auch Arme die sich bewegen können. Da wir hin und wieder...
Weiterlesen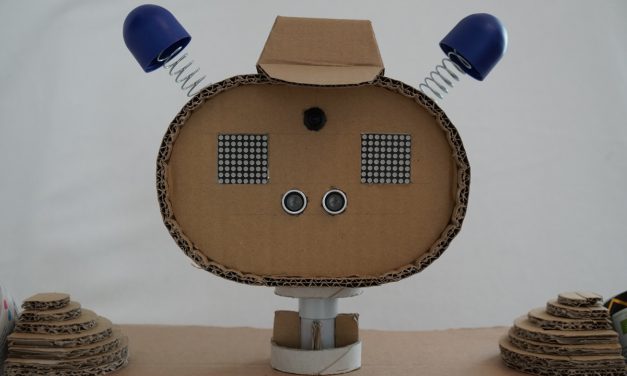
Die Einkaufliste listet alle Komponenten auf die für den Bau des Kinder-Roboters benötigt werden....
Weiterlesen
Roboter-Autos mit dem Raspberry Pi

Recent Comments