

Dexter Industries IMU Sensor 9-DOF Absolute Orientation BNO055
Bei einen meiner Roboter genauer gesagt bei dem GoPiGo Modell von Exter Industries hatte ich mir...
Weiterlesen
Bei einen meiner Roboter genauer gesagt bei dem GoPiGo Modell von Exter Industries hatte ich mir...
Weiterlesen
Bei meiner Suche nach einer Alternative zu den klassischen Ultraschall Sensoren bin ich auf die...
Weiterlesen
Ich war für meine Outdoor Roboter Projekte auf der Suche nach einem Funkgateway der viele Meter...
Weiterlesen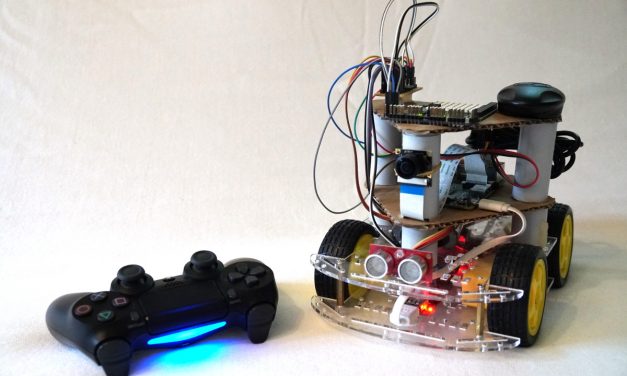
Ich wollte schon immer meine Roboter Autos mit einem Spiele Controller wie einem Playstation 4...
Weiterlesen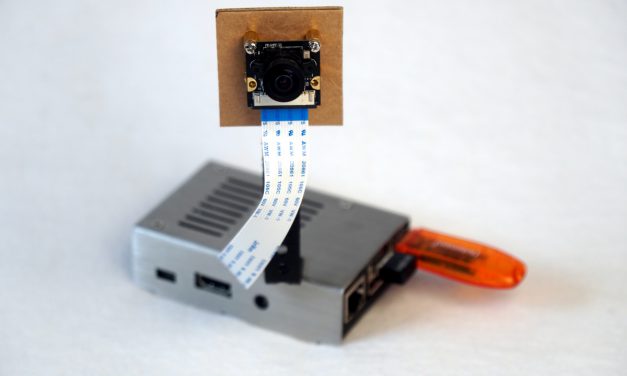
Nach meinem ersten Artikel über das Zeitraffer Video Projekt auf einem Raspberry Pi Computer habe...
Weiterlesen
Für die Steuerung meiner Roboter habe ich mir einen Playstation 4 (PS4) Controller zugelegt. Die...
Weiterlesen
Mein großer BigRob Roboter ist so gebaut, dass dieser viele Stunden im Freien operieren kann....
Weiterlesen
Ich habe lange im Netz nach einer Anleitung gesucht die beschreibt wie ich einen Playstation 3...
Weiterlesen
Ich habe immer wieder nach Verlängerungen für das klassische CSI Kabel gesucht mit dem die...
Weiterlesen
Der klassische Modellbau Fahrtenregler findet sich in RC Autos, Booten und Flugmodellen. Ich hatte...
Weiterlesen
Für einen Roboter Auto Wettbewerbe, den ich organisiert habe, hatte ich den Bedarf die...
Weiterlesen
Nach dem Zusammenbau folgt die Installation der Software. Die Installation und Konfiguration...
Weiterlesen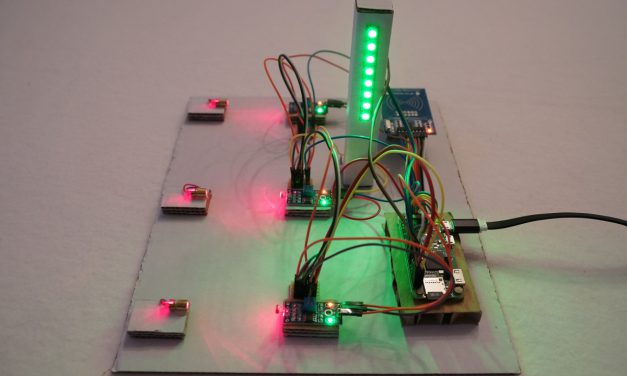
Für die Lichtschranke mit Start-Ampel habe ich einen Raspberry Pi ZERO W als zentrale...
Weiterlesen
Für einen Workshop mit 25 Teams benötige ich eine technische Lösung um automatisch die Rundenzeit...
Weiterlesen
Ich habe immer wieder nach einer einfachen Möglichkeit gesucht einen HC-SR04 Ultraschall Sensor an...
Weiterlesen
Ich habe in diesem Beitrag ein paar Einstellungen der W-LAN Konfiguration unter Raspbian zusammen...
Weiterlesen
Der Raspberry Pi Computer benötigt eine 5V Stromquelle. Diese muss auch in den Roboter Autos die...
Weiterlesen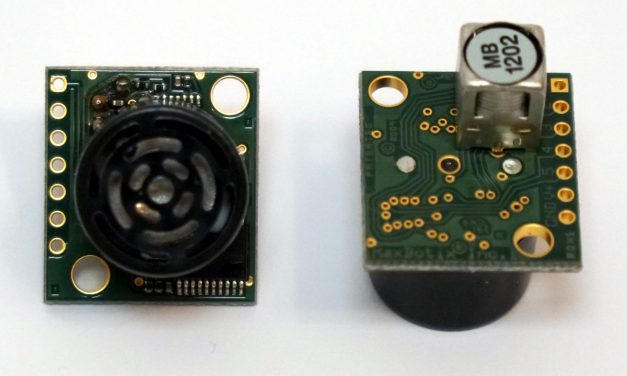
Ich habe zwei MaxBotix I2CXL MaxSonar EZ Ultraschall Sensoren für meinen Roboter gekauft. Ich habe...
Weiterlesen
Der I2C Bus ist sehr gut geeignet verschiedene Sensoren oder Boards wie einen Servo Kontroller am...
Weiterlesen
Die Anleitung beschreibt wie ein Schrittmotor mit einem Rapsberry Pi angesteuert werden kann. Die...
Weiterlesen
Während der letzten drei Jahre habe ich verschiedene Raspberry Pi Roboter gebaut. So habe ich die...
Weiterlesen
Ich hatte die Idee ein Gesicht mit zwei Augen für einen meiner Raspberry Pi Roboter zu bauen. Die...
Weiterlesen
Ich habe verschiedenste Raspberry Pi Roboter über die letzten Jahre selber gebaut. Alle haben...
Weiterlesen
In der Vergangenheit habe ich viele Roboter gebaut die eine L298N H-Brücke verwendet haben. Mit...
Weiterlesen
Ich habe immer wieder verschiedene W-LAN Antennen an meinem großen Raspberry Pi Roboter angebracht...
Weiterlesen
Ich stelle mir immer wieder die Frage wie schnell mein Netzwerk wirklich ist, also wie hoch die...
Weiterlesen
Big Rob ist ein immer hungriger Roboter. Das erkennt man schon an seinem Maul, dass er viel...
Weiterlesen
Seit längerem bin ich auf der Suche nach einem Modul mit dem ich die I/O Schnittstelle des...
Weiterlesen
Die Raspberry Pi Kamera war bis jetzt ohne einem Gehäuse am Roboter-Auto befestigt. Da ich aber...
Weiterlesen
Mit den XBee Modulen können verschiedene Netzwerkarchitekturen aufgesetzt werden. Ich verwende nur...
Weiterlesen
Nach dem im Teil 1 die Grundlagen besprochen wurden und der Servo Kontroller mit dem Raspberry Pi...
Weiterlesen
Seit längerem beschäftige ich mich mit dem Raspberry Pi und der Ansteuerung von Servo Motoren. Es...
Weiterlesen
Ich habe für meine unterschiedlichen Roboter-Autos verschiedene Elektromotoren eingesetzt. Sehr...
Weiterlesen
In diesem Artikel geht es darum zu zeigen wie prinzipiell eine genaue GPS-Positionierung erfolgen...
Weiterlesen
Nach dem die Basisstation aufgebaut ist und diese die GPS Daten überträgt folgt jetzt der Aufbau...
Weiterlesen
Nach dem Sie die Software für das RasPiGNSS Modul im vorherigen Artikel auf Ihrem Raspberry Pi...
Weiterlesen
In diesem Beitrag geht es darum welche Software installiert werden muss um die RasPiGNSS...
Weiterlesen
Die Basisstation und das Roboter-Auto müssen über Funk miteinander verbunden werden. Nur so kann...
Weiterlesen
Für den Aufbau meiner differential GPS Lösung mit zwei RasPiGNSS “Aldebaran” Modulen werden...
Weiterlesen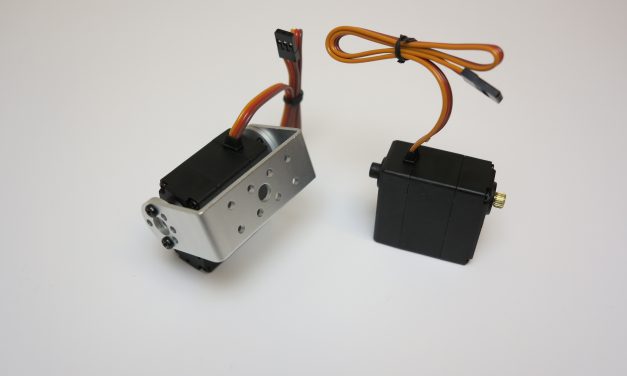
Warum ich einen Servo Motor mit dem Raspberry Pi ansteuern möchte erkläre ich nachfolgend. Ich...
Weiterlesen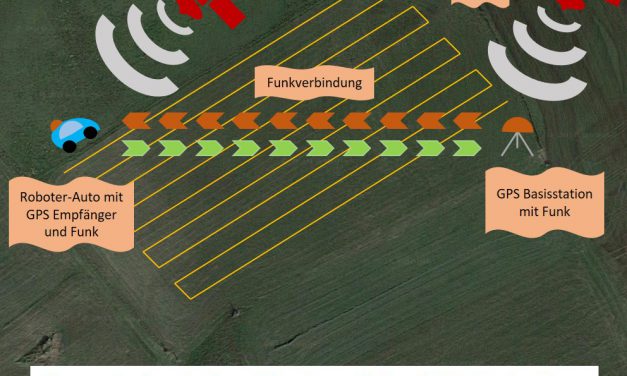
In diesem Beitrag stelle ich die Theorie vor wie der Aufbau für eine präzise GNSS Positionierung...
Weiterlesen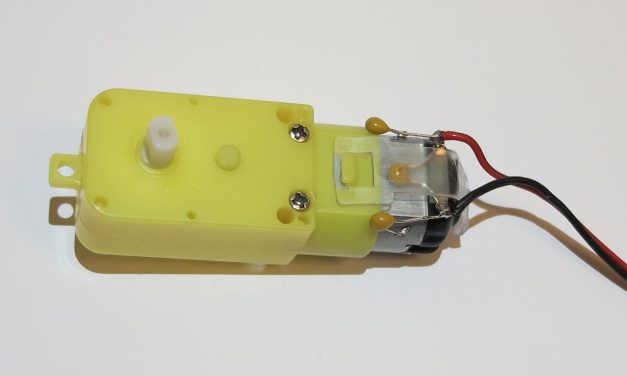
Mit dieser Anleitung beschreibe ich wie kleine 3 V bis 6 V DC Elektromotoren entstört werden...
Weiterlesen
Ich baue seit ein paar Jahren Roboter-Autos die in der Wohnung und auch im Freien fahren können....
Weiterlesen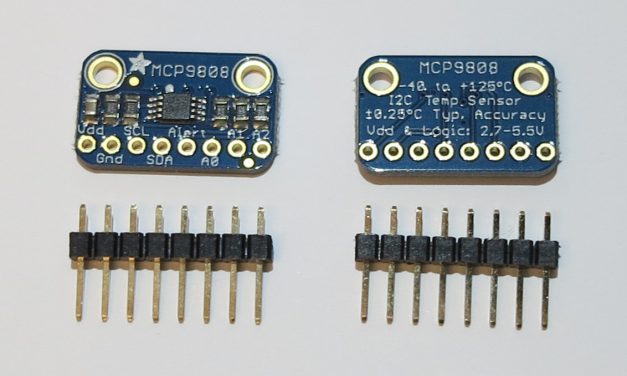
Ich war schon länger auf der Suche nach einem Temperatursensor den ich an einem Raspberry Pi...
Weiterlesen
Mit dem ZeroBorg Motor Treiber können bis zu vier Motoren unabhängig voneinander gesteert werden....
Weiterlesen
Heute habe ich damit angefangen einen Raspberry Pi betriebenen Sicherheitsroboter zu bauen mit dem...
Weiterlesen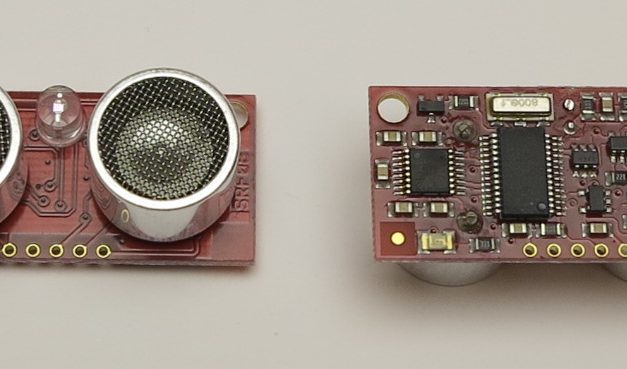
Ich habe mich für den Ultraschall Sensor SRF08 entschieden, da diese über einen I²C Bus verfügt...
Weiterlesen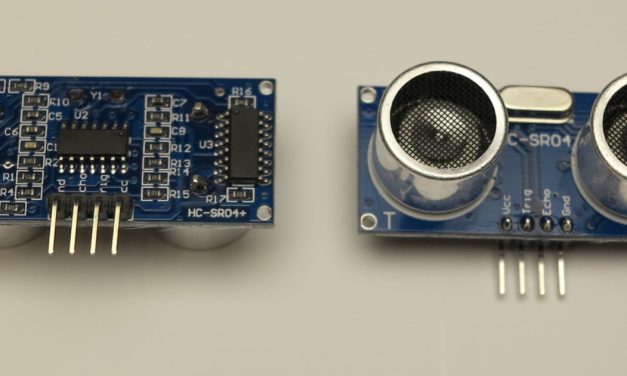
Ich habe verschiedene ferngesteuerte Autos und Roboter mit einem Raspberry Pi Computer gebaut und...
Weiterlesen
Es ist wichtig, dass der Raspberry Pi mit einem Kühlkörper im ferngesteuerten Auto ausreichend...
Weiterlesen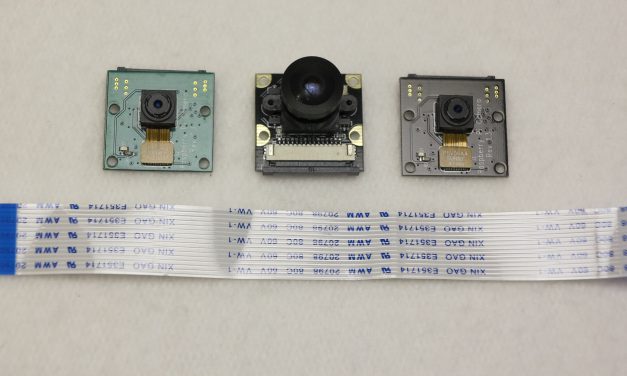
Die normale Raspberry Pi Kamera und die Raspberry Pi NoIR Kamera sind Kameras entwickelt speziell...
Weiterlesen
Roboter-Autos mit dem Raspberry Pi

Recent Comments